Autonomous Robot Design
Robot was used in a competition to achieve maximum points in three categories: Raising a rocket, moving to target and depositing balls in rotating zones, as well as getting wooden block out of the target zone without disrupting the other obstacles.
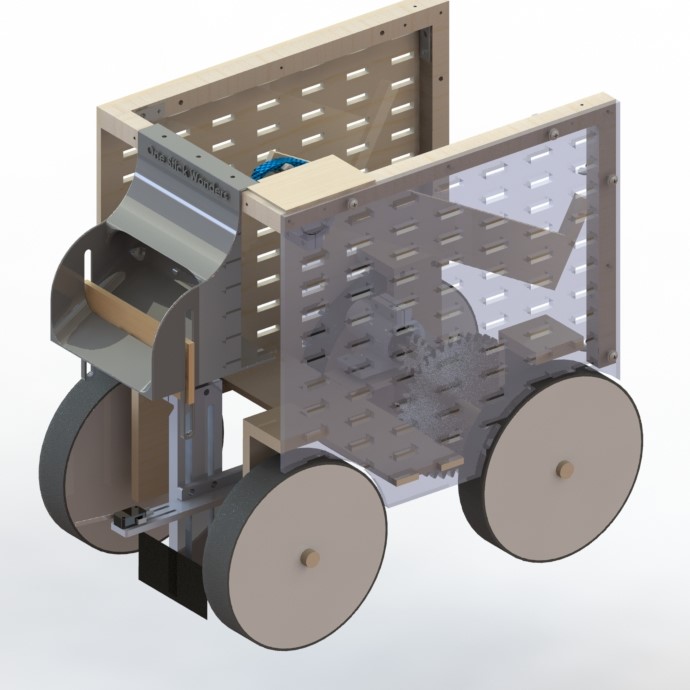
The robot consists of four subsystems: drivetrain, 3D printed ramp, adjustable level switch, and raising mechanism. I was responsible for the drivetrain and ramp design. The ramp was specified at an angle of 45 degrees, with curved upper surface to prevent the ping pong balls from bouncing out during transport to drop off zone. The drivetrain was made using 3D printed gears and a wooden dowel for the back wheel axle. The axle was secured in place with the gears using screws, and was aligned with the motor to increase the torque.
Software used: Solidworks, Arduino Manufacturing Techniques: 3D printing, wood machining (Bandsaw, Drill press), Rapid prototyping